ROBOT "CHÂN CHẠY" CỦA CÂY TRỒNG
Công ty Vincross vừa giới thiệu mẫu robot sáu chân đội một cái cây trên đầu. Thoạt nhìn, con robot "đầu chỉ để trồng cây" này giống hệt con pokémon Bulbasaur. Nó luôn hướng tới ánh sáng khi cây cần quang hợp, và sẽ lùi vào bóng râm khi đã "sạc" đủ nắng cho cái cây trên đầu, giúp cho cây được phát triển bình thường. Robot còn biết "chơi đùa" với con người nếu như ta chạm vào đầu nó, khi "khát" nước, nó sẽ dẫm nhẹ 6 cái chân nhỏ bé để báo hiệu.
Chưa rõ con robot này theo dõi những chỉ số như ánh sáng, bóng râm hay độ ẩm cây như thế nào. Nhưng những cảm biến đơn giản cũng có thể làm được việc nó, nên rõ là không khó.
Ông chủ của Vincross cho biết anh có cảm hứng chế tạo ra con robot này khi thấy một bông hoa hướng dương chết khô trong góc tối tại một buổi triển lãm công nghệ. "Với chân robot, thực vật có thể trở nên cơ động hơn thậm chí có thể tương tác được với chúng ta… Tôi thực sự mong rằng dự án này có thể truyền cảm hứng cho mối quan hệ đặc biệt của tự nhiên và công nghệ". Hãy thử tưởng tượng xem nếu con robot này tăng kích thước lên vài chục lần với một cái cây khổng lồ trên đầu, khu vườn của chúng ta có phải sẽ sống động hơn nhiều hay không?
 "ROBOT MÙ" VẪN CHẠY, LEO CẦU THANG THÀNH THẠO
"ROBOT MÙ" VẪN CHẠY, LEO CẦU THANG THÀNH THẠO
Chúng ta đã từng thấy những con robot của Boston Dynamics có thể di chuyển trên hai chân thành thạo hay leo trèo bậc thang và chạy tốc độ cao. Thế nhưng để làm được như vậy, chúng thường phải dựa vào camera và cảm biến để có được tầm nhìn phía trước.
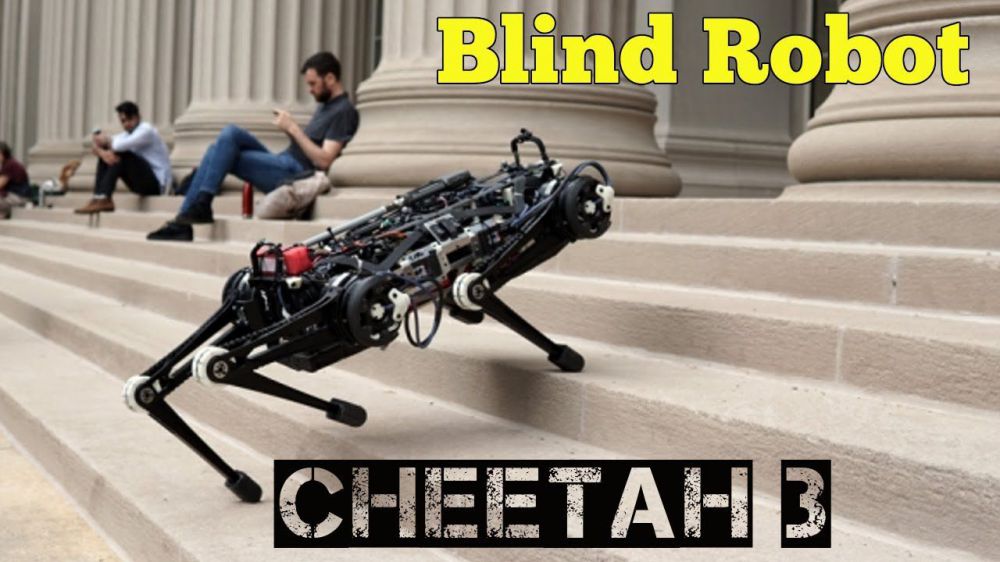
Nếu không có camera, robot có còn di chuyển được chính xác hay không? Có thể. Mẫu robot Cheetah 3 do nhóm nghiên cứu Viện công nghệ Massachusetts MIT (Mỹ) giới thiệu hoàn toàn không tích hợp camera hay nói cách khác là bị "mù". Thế nhưng nó vẫn có thể chạy, nhảy lên bục và thậm chí leo cầu thang mà không gặp bất cứ trở ngại nào.
Cheetah 3 sử dụng tới hai thuật toán mới được MIT phát triển, giúp nó có thể quyết định cách thức xử lý tình huống khi gặp phải chướng ngại vật. Cheetah 3 đặc biệt có khả năng cân bằng cực tốt và trọng lượng chỉ khoảng 40kg, ngay cả khi đạp hoặc đẩy với một lực rất mạnh từ nhiều hướng, robot có thể nhanh chóng lấy lại được thăng bằng một cách dễ dàng. Cheetah 3 hứa hẹn đem tới cơ hội tuyệt vời để phát hiện những khả năng tiềm ẩn của robot khi không có sự trợ giúp của camera.
Năm 2015, MIT cũng phát triển thành công mẫu robot Cheetah 2 với khả năng thực hiện cú nhảy qua chướng ngại vật nhỏ với tỷ lệ thành công lên tới 90%. Tuy nhiên mẫu robot này vẫn phải dựa vào một hệ thống thị giác sử dụng phản xạ từ tia laser để lập bản đồ địa hình.
 HUẤN LUYỆN THÀNH CÔNG ROBOT CỨU HỘ CHO ĐỊA HÌNH PHỨC TẠP
HUẤN LUYỆN THÀNH CÔNG ROBOT CỨU HỘ CHO ĐỊA HÌNH PHỨC TẠP
Được chế tạo với khả năng đi trên các bậc đá với độ cao khác nhau mà không bị ngã, robot Berkeley có thể được dùng cho công tác cứu hộ cứu nạn.
Những robot có thể di chuyển hiện nay thường gặp vấn đề trên dạng địa hình không bằng phẳng nhưng các nhà khoa học tại Đại học California (Mỹ) đã khắc phục được vấn đề này khi dùng công nghệ học máy để "dạy" robot Berkeley của mình thích nghi với bề mặt gập ghềnh.
Cho đến nay, thuật toán AI phức tạp sẽ hướng dẫn robot di chuyển dựa theo quy tắc nghiêm ngặt về vị trí đặt chân, do đó khoảng cách và chiều cao của mỗi bước đi trở nên khá cứng nhắc, dẫn đến việc robot bị ngã khi đi trên địa hình gồ ghề. Hệ thống mới "dạy" robot hai chân làm sao xử lý bước chân hợp lý hơn, từ đó cho phép Berkeley đi lại thoải mái hơn, giúp nó linh hoạt hơn bất kì phiên bản robot nào trước đó.
Trong các bài kiểm tra với những tảng đá đa dạng về chiều cao và khoảng cách được thay đổi ngẫu nhiên, mỗi robot Berkeley đều có thể di chuyển dễ dàng mà không ngã, ngay cả khi chúng chưa từng gặp địa hình tương tự trước đó.
Nhóm kỹ sư cho biết công nghệ này có thể được sử dụng trong nhiệm vụ cứu nạn, tìm kiếm khi thiên tai xảy ra. Chúng là những cỗ máy tuyệt vời trong việc định hướng trên địa hình không có cấu trúc nhất định và không đồng đều. Thêm vào đó, chúng linh hoạt hơn nhiều so với các robot di chuyển bằng bánh xe vốn thường gặp khó khăn khi điều hướng trên địa hình nhiều khoảng trống hay chiều cao thay đổi liên tục.
 VĨNH BIỆT ASIMO, CHÚ ROBOT DỄ THƯƠNG NHẤT THẾ GIỚI
VĨNH BIỆT ASIMO, CHÚ ROBOT DỄ THƯƠNG NHẤT THẾ GIỚI
Honda vừa thông báo sẽ ngừng phát triển dự án Asimo, sau 18 năm. Robot có hình dáng giống con người này đã từng là niềm tự hào công nghệ của Nhật Bản. Tuy nhiên giờ đây Asimo lại tỏ ra khá vô dụng, ngay cả trong vai trò một hướng dẫn viên du lịch.
Ra mắt vào đầu thế kỷ 21, Asimo là robot đầu tiên có thể mô phỏng lại dáng đi bằng hai chân giống như con người. Nó mở ra viễn cảnh về một tương lai không xa, con người sẽ được robot phục vụ từ việc nấu nướng cho đến dọn dẹp nhà cửa.
Đáng tiếc, Honda lại là một công ty sản xuất xe hơi và xe máy. Họ chưa bao giờ có ý định nghiêm túc trong việc phát triển và kinh doanh robot. Chính vì vậy, Asimo chỉ như một chiêu thức quảng bá thương hiệu của Honda. Và sau 18 năm phát triển, chú robot này vẫn không có bất kỳ cải tiến nào. Trong khi đó, công nghệ robot hiện đã có những bước tiến rất xa.
Tuy nhiên điều đó không có nghĩa Asimo là một thất bại của ngành công nghiệp robot, trái lại đó là sự thành công lớn nhất. Có thể nói rằng Asimo là robot đầu tiên chiếm được cảm tình của chúng ta, bởi sự thân thiện và vẻ ngoài đáng yêu.
 ROBOT BAY BIẾN HÌNH ĐƯỢC TRÊN KHÔNG
ROBOT BAY BIẾN HÌNH ĐƯỢC TRÊN KHÔNG
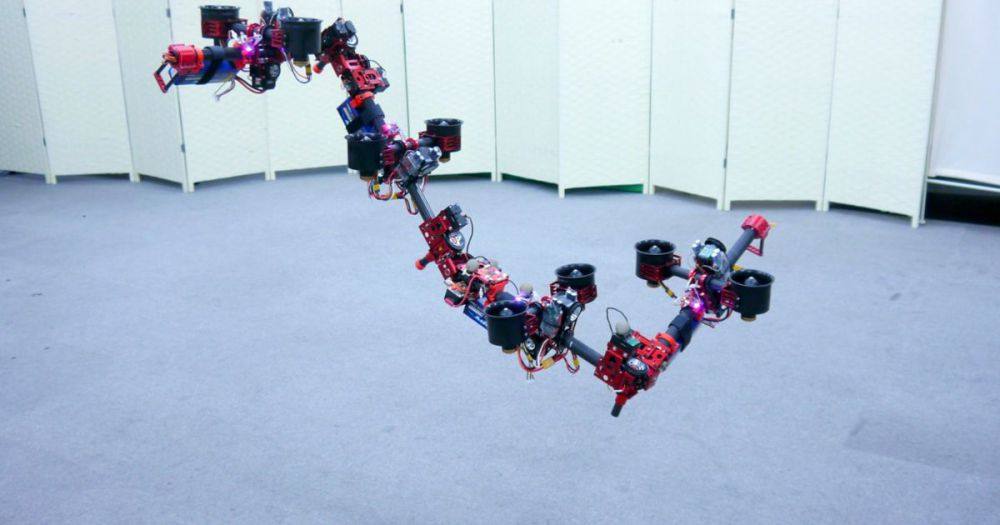
Nhóm chuyên gia robot tại Đại học Tokyo (Nhật) vừa chế tạo thành công robot Dragon có khả năng bay trong thời gian ngắn và tái sắp xếp các bộ phận của mình. Dragon gồm 4 bộ phận chính, mỗi bộ phận được trang bị hai cánh quạt. Chúng được nối với nhau nhờ các khớp chạy bằng pin. Robot này có thể cảm nhận không gian xung quanh và tự xác định cần chuyển sang hình dạng nào để vượt qua một khu vực cho trước.
Việc chế tạo thiết bị bay tự lái hoạt động trong nhà gặp rất nhiều thử thách, trong đó có vấn đề di chuyển ở không gian hẹp. Các nhà phát triển thường đứng trước hai lựa chọn. Một, thu nhỏ thiết bị bay, nhưng chúng có thể quá yếu và không thực hiện được nhiều nhiệm vụ. Hai, làm khung bảo vệ bên ngoài, nhưng điều này cũng sẽ hạn chế khả năng hoạt động.
Hiện Dragon chỉ có thể duy trì trạng thái bay trên không khoảng ba phút. Tuy nhiên, robot này vẫn linh hoạt và có sức mạnh khá lớn. Nhóm chuyên gia dự định tăng số bộ phận ghép nối lên thành 12 và thêm tay kẹp để robot cầm nắm và di chuyển vật thể. Trong tương lai, phiên bản mới của Dragon có thể hoạt động ở những không gian nhỏ và nguy hiểm, hỗ trợ công tác cứu hộ. Nó sẽ tìm kiếm người sống sót trong tòa nhà bị sập hoặc di chuyển gạch vỡ nếu cần.